А.И. САМАРИН
НИИ нейрокибернетики им.
А.Б. Когана РГУ г. Ростов н/Д
МОДЕЛЬ АДАПТИВНОГО ПОВЕДЕНИЯ
МОБИЛЬНОГО РОБОТА, РЕАЛИЗОВАННАЯ С ИСПОЛЬЗОВАНИЕМ ИДЕЙ САМООРГАНИЗАЦИИ
НЕЙРОННЫХ СТРУКТУР
Аннотация. Для широкого круга задач с неявно
заданным критерием правильности функционирования нейронной сети, особенно в
нейросетевых моделях поведения, традиционные алгоритмы обучения мало
эффективны. В докладе анализируется подход к созданию моделей адаптивного функционирования
нейронных сетей с использованием идей их самоорганизации на примере модели
мобильного робота.
Abstract.
For a wide range of the tasks with implicitly given
criterion of correctness of functioning neural networks, it is especial in
neural network models of the behavior, traditional learning algorithms are
poorly effective. In the report the approach to creation of adaptive neural
network models with use of their selforganization on an example of the mobile
robot model is analyzed.
Целенаправленное поведение
Модель управления мобильным роботом строится
по аналогии с системой управления живым организмом, когда нужно не просто
как-то реагировать на те или иные стимулы, а достигать некоторые системные цели
(самосохранение, продолжение рода, энергообеспечение и т.д.). Если эти главные
цели не будут достигаться, то говорить о каком-то поведении нет смысла.
Все переменные организма робота и среды можно
разделить на две группы – существенные и несущественные. К первым переменным
относятся те, на которых строится система целей или целевых функций, среди
которых целевые функции самосохранения являются доминирующими. Полагается, что
все эти функции знакоположительны и достигают минимального значения при попадании
существенной переменной в область допустимых значений. Например, температура
внешней среды является для организма такой существенной переменной. Если
температура выше или ниже определенных границ, то целевая функция, построенная
на этой переменной, будет увеличивать свое значение. Цель же системы – минимизировать
значения целевых функций. На языке психофизиологии можно сказать, что у системы
при этом возникает мотивация обеспечения комфортных температурных условий.
Увеличение мотивации приводит к увеличению двигательной активности, в результате
чего при повышенной температуре робот может найти тень или продуваемое место, а
при температуре ниже комфортной робот путем блуждания находит прогреваемое
место. Для простоты считаем, что система не обладает внутренними контурами
регулирования типа потоотделения в одном случае и дрожания в другом. Достижение
всех целей должно достигаться только за счет перемещения во внешней среде.
Формально все это можно представить так.
Пусть Х – все многообразие внешних и
внутренних измеряемых переменных
![]()
XS – существенные переменные,
непосредственно влияющие на состояние робота,
XI – индифферентные
переменные, которые регистрируются системой рецепторов, но непосредственно не
влияют на состояние робота.
В силу закономерностей внешнего мира индифферентные
переменные могут быть связаны каким-то образом с существенными переменными и,
если система научится отображать эти закономерности внешнего мира и
использовать их для достижения целей поведения, то ее поведение может стать
беспоисковым и более эффективным. В этом случае можно уже говорить, что робот обладает
свойством опережающего отражения действительности.
Если придерживаться определения интеллекта, как
способности системы отображать закономерности внешнего мира и использовать их
для достижения своих целей (такое определение наиболее общее и простое), то
можно говорить, что робот, который для достижения целей (минимизации целевых
функций) начинает в процессе активного взаимодействия с внешней средой
использовать ранее незначимую информацию, обладает элементами интеллекта.
Считаем, что
робот имеет систему управления, с помощью которой осуществляется перемещение во
внешней среде. Можно записать, что Y = Ui Yi , где Y – вектор управляющих воздействий на исполнительные
органы, Yi – управляющие воздействия
конкретными исполнительными органами (поворот головы, перемещение с помощью
движителей и т.д.). Из перемещений формируются обобщенные действия. Обобщенные
действия обозначим R=R(Y).
Условия целенаправленного
поведения могут быть записаны как
![]()
![]()
Такая запись
означает, что ищется минимум целевой функции Q(XSi), определенной
на одной или нескольких существенных переменных XSi с помощью управления Yi .
Целевые функции и иерархия
целей
Все условия самосохранения, энергообеспечения,
внешнего предназначения могут быть выражены
в виде совокупности целевых функций от существенных переменных [1]. Эти целевые
функции могут зависеть только от этих переменных, но могут зависеть и от
времени. Время также может выступать в качестве существенной переменной, когда
достижение цели зависит от времени реакции, или же когда задается функция
энергопотребления.
Приведем примеры таких целевых функций.
Целевая функция с единственной точкой минимума –
![]() ;
;
Qi(XSi)=min при XSi=XSi*;
Целевая функция с областью минимальных значений –
![]() ;
;
![]() ,
,
где
r – оператор порогового ограничения: r(a)
= a, если a > 0,
r(a) = 0,
если a < 0.
Целевая функция с временными параметрами –
![]()
– значения функции возрастают во времени и
обнуляются при XSi =XSi* на время ΔT.
Если одновременно несколько целевых функций не имеют
минимального значения (например, для животного несколько мотиваций – голод и жажда),
а достижение этих целей возможно только с помощью одних и тех же исполнительных
органов, то может возникать противоречивость целей. Снятие противоречий при
многоцелевом функционировании робота, как и в живой природе возможно путем
использования принципа доминанты. Доминирующая цель – та, значение которой в
данный момент выше, или которая выше в иерархии целей, – блокирует или
трансформирует остальные целевые функции и робот функционирует как одноцелевая
система.
Формально условие блокировки целевой функции Qi целевыми функциями Qj можно представить как:
![]()
![]()
Здесь
есть противоречивость целей, так как все цели могут достигаться только с использованием
одних и тех же управляющих воздействий Ym. Иерархия целей
определяется коэффициентами aij.
Однако более интересным является вариант
трансформации целей, записанный как:
![]()
Различия этих двух вариантов изменения подчиненной
или менее актуальной целевой функции поясняются рисунком 1. При блокировке
целей (рисунок 1б) область допустимых значений блокируемой целевой функции
расширяется и на время доминирования другой цели мотивация достижения этой цели
уменьшается.
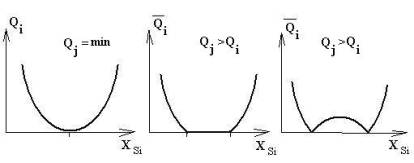
а б в
Рис. 1. Два варианта (б, в)
модификации целевой функции Qi (а) при условии
доминирования Qj.
Как видно из рисунка 1в, при трансформации целевых функций на время противоречивости целей
условия минимума подчиненной цели Qi меняются.
Видимо, такой тип доминирования с трансформацией
целевых функций для системы более выгоден, так как не позволяет ей, при выходе
из тупиковой ситуации, сразу же в нее вернуться.
В общем случае, когда априори нельзя выстроить
иерархию целей и неизвестно с помощью каких управлений достигается минимум той
или иной целевой функции, можно сначала ввести полную взаимообусловленность
целевых функций при минимальных значениях aij. В процессе активного
поискового поведения может происходить подстройка aij, в результате чего
выстраивается иерархия целей
Один из вариантов подстройки этих коэффициентов
взаимообусловленности и иерархии целей может быть представлен как:

Влияние j-ой целевой функции на i-ую
минимально, если при управлении Yl, приводящем к минимизации Qi , оно не оказывает влияния на Qj.
Таким образом, при синтезе автономного робота,
исходя из условий его самосохранения и предназначения, необходимо разработать
некоторую систему целевых функций, определить начальную иерархию целей, сформировать
некоторые безусловные управления по типу реакций отдергивания при уколе,
независимо от доминирующей цели. Безусловное управление не позволяет
существенным переменным выйти за критические значения. К этим безусловным
реакциям добавляется поисковое экстремальное управление, приводящее к
минимизации целевых функций (поисковому достижению целей). На фоне этого
поискового управления и должно формироваться управление по информационным
признакам, когда, образно говоря, робот сам обучается пользоваться глазами для
выбора не загроможденного пути, используя ранее не значимую зрительную
информацию, или же идентифицирует более яркий участок среды для решения задач
энергообеспечения.
Описанная схема целенаправленного поведения робота
может быть представлена блок-схемой, приведенной на рисунке 2. Здесь показано,
что целенаправленное поведение должно обеспечиваться, по крайней мере, тремя
контурами управления: безусловное, поисковое и информационное, причем
максимальный интерес представляет информационное управление, становление
которого в процессе поведения и позволяет рассматривать вопросы формирования
интеллекта робота. На моделях роботов такие построения проверяемы, но они в
полной мере относятся и к живым системам.
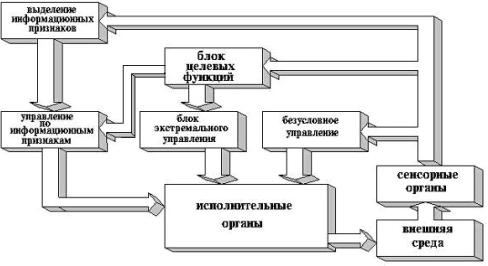
Рис. 2. Блок-схема информационно-управляющей системы
робота.
Естественно, что в качестве базовой структуры
информационного управления должны использоваться нейросетевые структуры,
полнота и универсальность базиса которых
рассматривалась во многих работах [2]. Попытки нейросетевой реализации
алгоритмов управления роботом в настоящее время не имеют таких впечатляющих
решений, как, например, при использовании нейронных сетей в задачах
классификации. В задачах классификации, путем формирования обучающей выборки,
задается – какого типа преобразование входного вектора в выходной должно быть
получено. Здесь же, при формировании информационного управления, функция «вход
– выход» ищется от одних переменных, а значения целевой функции задаются на
других переменных. Если такая функция в системе управления будет найдена, то
фактически будет найдена взаимосвязь этих переменных во внешнем мире и
нейронная сеть отобразит эту взаимосвязь применительно к достижению целей
робота.
Так как в этом случае классические алгоритмы
обучения типа обратного распространения ошибки уже не работают, то приходится
применять алгоритмы адаптации, которые при огромном числе регулируемых
параметров практически мало эффективны.
Самоорганизация нейронных
сетей, модель нейрона с оптимизацией параметров
Именно в связи с малой эффективностью алгоритмов
адаптации многопараметрических объектов и высокой эффективностью адаптивной деятельности
нервной системы животных и человека проблеме самоорганизации
информационно-управляющих систем мозга уделяется много внимания. Причем сам
предмет изучения – самоорганизация, остается интуитивно определенным. Если в
качестве рабочего определения организации принять определение одного из толковых
словарей «Организация – это объединение элементов в систему для реализации
заданной функции», то при самоорганизации такое объединение элементов должно
происходить самостоятельно. А это значит, что эта функция должна как-то
отражаться в свойствах элементов и элементы должны иметь стимул и возможности
для такого объединения.
Поэтому, начиная с первых кибернетических работ в
этом направлении, процесс самоорганизации рассматривался как коллективное
поведение автоматов [3] или элементов с некоторыми внутренними критериями. Причем
в первой модели такой самоорганизующейся системы – гомеостате Эшби [4],
критерием оптимального состояния каждого элемента являлось поддержание движка
реостата в определенном положении. Критерий функционирования гомеостата как системы
или системный критерий заключался в достижении оптимального состояния всех
элементов. Получалось, что достижение оптимума одного элемента происходит за
счет подстроек параметров других, т.е. происходит некоторое взаимосодействие
элементов.
Взаимосодействие элементов в достижении результата
П.К. Анохин считал одной из отличительных черт функциональной системы. Он
писал:
«Системой
можно назвать только такой комплекс избирательно вовлеченных компонентов, у которых
взаимодействие и взаимоотношение приобретают характер взаимоСОдействия
компонентов на получение фокусированного полезного результата» [5] стр.28.
В работе М.Л. Цетлина [3] по поведению коллектива
автоматов стратегия поведения каждого автомата определялась выигрышем всех, а
выигрыш коллектива определялся как сумма выигрышей каждого. При дальнейшем
развитии этих идей в работах Ю.И. Неймарка [6] автоматы уже могли решать
сложные задачи управления каким-либо объектом, когда системный критерий (например,
поддержание равновесия виртуального велосипедиста) декомпозировался в критерии
выигрыша каждого элемента. Кроме модификации матрицы состояний, автоматы
случайным образом могли переходить с одного канала управления параметрами
объекта на другой. Эффективность таких автоматных систем управления, в
современной терминологии можно сказать – многоагентных систем, по скорости
адаптации в несколько раз превосходила традиционные системы оптимизации. Автоматы
в этих моделях взаимодействовали друг с другом только через среду.
Одной же из первых моделей, связанных с
самоорганизацией нейронных сетей, была модель самоорганизующегося формального
автомата, представленная в работах Л.Б. Емельянова-Ярославского [7,8]. В его
работах четко формулируется наличие собственного механизма оптимизации состояния
нейрона, вводится понятие критического звена системы, в активности которого
отражаются системные цели функционирования (в нашей модели – блок целевых
функций). Критическое звено воздействует на нейроны самоорганизующегося
автомата, нейроны выходят при этом из оптимального состояния и начинают
подстраивать свои параметры (веса связей), чтобы вновь достигнуть оптимума, но
оптимум достигается только тогда, когда минимизируется активность критического
звена. Это означает, что элементы занимаясь только своими проблемами, автоматически
формируют такие взаимоотношения, при которых достигается системная цель.
Квинтэссенция модельных построений Л.Б. Емельянова-Ярославского заключается в
двух сформулированных им предложениях: первое – «Импульсная активность нейрона
нужна самому нейрону» и второе – «Зачем нейрону нужен мозг?».
Подобный подход в исследовании процессов
самоорганизации нейронных систем развивался и в НИИ нейрокибернетики им. А.Б.
Когана [9]. Предполагалось, что нейрон имеет два типа входов. Весовые коэффициенты
одних входов подстраиваются. Подстройка коэффициентов происходит только при
отклонении некоторого интегрального инерционного параметра нейрона – порога, от
оптимального положения. Другие входы имеют фиксированные весовые коэффициенты.
По этим входам приходит критериальное воздействие из блока целевых функций и
отклоняет пороги нейронов от оптимума. Кроме того, случайные возмущения,
приходящие на нейронную сеть, значительно усиливаются при отклонении целевых
функций от оптимума. Это свойство усиливать поисковую активность при актуализированной
мотивации характерно и для живых систем. В экспериментах показано, что при
наличии мотивации и отсутствии пусковых стимулов характер активности нейронов
становится более стохастическим [10]. Таким образом, получается, что при отклонении
системного критерия от оптимума, на все нейроны поступают критериальные
воздействия и увеличиваются случайные возмущения. Нейрон не может
минимизировать это воздействие за счет уменьшения его весового коэффициента, а
вынужден под влиянием случайных поисковых возмущений менять весовые
коэффициенты информационных входов и межнейронных связей. В итоге, оптимизация
состояния всех нейронов наступает тогда, когда за счет изменения межнейронных
связей будет найдена такая реакция или совокупность реакций сети на ранее
незначимые стимулы, при которой системный критерий минимизируется. А это
происходит тогда, когда в сети отобразится зависимость внешнего мира между
существенными и информационными (ранее индифферентными) переменными. Для сети
аналоговых нейронов при достаточно простых связях между переменными «внешнего
мира» модельные исследования показали высокую эффективность описанных
алгоритмов [11].
Более сложная модель поведения на основе описанных
системных представлений была реализована в модели системы управления мобильного
робота [12].
Модель автономного
мобильного робота
Модель автономного мобильного робота создавалась для
проверки развиваемых представлений о кибернетических системах с целеполаганием.
В условиях полунатурного эксперимента нужно было показать, что, задав только
некоторую совокупность целевых функций от одних переменных, можно в процессе
активного перемещения в среде добиться формирования «разумного», с нашей точки
зрения, поведения робота с использованием иной сенсорной информации. Наиболее
близкая аналогия состоит в задаче самостоятельного обучения вдруг прозревшего
человека пользоваться глазами.
Модель робота. Модель робота представляет
собой тележку с электроприводами на гусеничном ходу, оснащенную имитаторами
дистантных визуальных датчиков и контактных тактильных датчиков (рис. 3). Те и
другие датчики выполнены в виде линеек фотодиодов. Каналы первичных преобразователей
«зрительных» и «тактильных» сигналов расположены на самой тележке. Информационно-управляющее
устройство, состоящее из электронных моделей адаптивных нейронов с самоподстройкой
параметров, выполнено в виде отдельного блока (рис. 4)
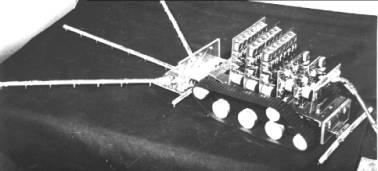
Рис. 3. Модель мобильного
робота с имитаторами дистантных и контактных датчиков
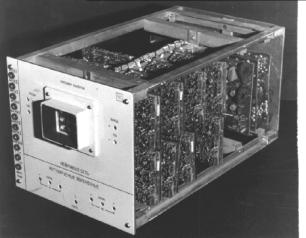
Рис. 4. Электронная модель
«мозга» робота на базе импульсных нейронов с самоподстройкой параметров
По кабелю связи сигналы от датчиков в темпе
реального времени поступали в нейронную сеть, управляющие сигналы на приводы
робота поступали от нейронной сети по этому же кабелю.
Модель среды. Синтезировалась плоская
среда с произвольно расположенными препятствиями, которые имитировались белыми
плоскими фигурами на темном фоне. Среда не содержала узких тупиков, но в ней
могли присутствовать узкие проходы, ширина которых была меньше линейных
размеров робота. Размеры среды были ограничены полигоном четыре на четыре метра
окруженного белым фоном. На рисунке 5 показано перемещение робота по одному из
участков среды
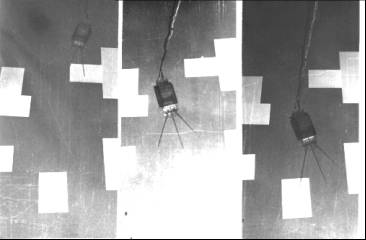
Рис. 5. Фрагмент модельной
среды с перемещающимся роботом.
Целевые функции и предназначение робота. При формировании целевых
функций учитывалось предназначение робота. Предполагалось, что созданная модель
– это некоторое нулевое приближение робота-разведчика, робота-первопроходца. У такого робота можно
выделить две главные цели: выжить в незнакомой среде как можно дольше и переместиться
от исходной точки как можно дальше. Фактически именно такие цели закладывались
при разработке луноходов. Создателям было все равно, куда они идут по Луне,
главное, чтобы прошли больше. В данной модели полагалось, что робот проживет
дольше, если он как можно реже будет сталкиваться с препятствиями. Отсюда
первая доминирующая целевая функция самосохранения строится на существенных переменных,
поступающих от датчиков соударения с препятствиями. Полагается, что при наличии
соударения спереди – переменная η1, или сзади – η2,
целевая функция Q1(η1, η2)
резко возрастает и, медленно уменьшаясь, держится некоторое время ΔΤ.
Если в течение ΔΤ приходит очередной сигнал соударения, то
происходит суммация новых значений этой целевой функции с остаточными
значениями.
Вторая прагматическая целевая функция строилась на
переменных, связанных с управлением движением. Целевая функция Q2(μ1, μ2)
строилась как:
Q2(μ1, μ2)
= r[(mod(μ1 - μ*)
– λ) + (mod(μ2 - μ*)
– λ)];
где
μ1 и μ2
– скорости правого и левого двигателей,
μ* – значение оптимальной скорости, λ – величина диапазона
допустимых скоростей, r – оператор порогового
ограничения для формирования знакоположительной величины Q2.
В понятийной интерпретации на языке «нравится – не
нравится» можно сказать: роботу нравится
двигаться вперед с определенной скоростью и не нравится соударяться с
препятствиями. Целевая функция соударения является доминирующей и при ненулевом
значении она трансформирует целевую функцию комфортности движения. На время
последействия соударения диапазон оптимальных скоростей расширяется и
оптимальным становится на это время неравенство скоростей.
Информационно-управляющая система робота. Нейронная сеть информационно-управляющей системы робота имеет три
слоя нейроноподобных элементов (рис. 6). На слой сенсомоторных нейронов
приходят воздействия от сенсоров левой, правой и центральной полос зрения Х1 –
Х3, и информация о моторных управляющих сигналах от нейронов цепи обратной
связи. Слой мотонейронов и нейронов цепи обратной афферентации содержит
элементы с самоподстройкой параметров. В слое сенсомоторных элементов такой
подстройки нет. Критериальные воздействия от блока целевых функций поступают на
элементы с самоподстройкой параметров. Управляющая система содержит генератор
случайных воздействий ξ, амплитуда которых возрастает при увеличении
значений целевых функций. Если системный критерий не выполняется, то случайные
воздействия поступают на слой мотонейронов, приводя к движению типа случайных
блужданий. Сигналы от тактильных входов, кроме блока целевых функций, поступают
на соответствующие мотонейроны, обеспечивая безусловные реакции отъезда в
противоположную сторону при соударении спереди или сзади.
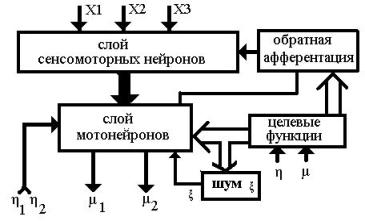
Рис. 6. Блок-схема
нейросетевой управляющей системы мобильного робота.
Начальные значения подстраиваемых коэффициентов
связи задавались произвольными.
Поведение. На полигоне располагались препятствия, и
наблюдалось перемещение робота в заданной среде. Так как начальные связи были
произвольными, то реакции робота на попадания препятствия в ту или иную полосу
зрения варьировала от отсутствия реакции до ускоренного движения на
препятствие. Сюда же включались и реакции поворота направо при препятствии
справа. В силу случайности связей могли быть и реакции адекватного с точки
зрения минимизации целевых функций реагирования. Но как раз этот случай был
наименее интересным. В процессе столкновений с препятствиями, отскоков и
случайных блужданий происходила самоподстройка параметров нейронов и, как
следствие этого, самоорганизация нейронной сети. Эффективность самообучения
робота оценивалась по числу столкновений до первого удачного объезда
препятствия по «зрительной» информации, вторая оценка была связана с десятью
подряд удачными объездами препятствий и, наконец, третья оценка была связана с
тестированием системы на движение по проходам разной ширины. В зависимости от
начального распределения весов связей и сложности среды эти показатели
варьировали довольно широко. Но конечный результат – определение, что информация
от зрительных датчиков как-то связана с препятствием, определение знака и
зависимости реагирования на зрительный сигнал путем поворота на определенный
угол, а также реагирование на узкий проход, достигался всегда. Внешний
наблюдатель весь процесс самообучения мобильного робота на понятийном уровне
интерпретирует следующим образом: на первом этапе робот обучается пользоваться
«глазами» для объезда препятствий без столкновения; на втором этапе
вырабатывается оптимальное реагирование на зрительные сигналы, при котором
целевая функция, связанная с моторными командами, не выходит за пределы
допустимого диапазона; на третьем этапе робот обучается оценивать ширину
прохода по отношению к линейным размерам его корпуса.
Заключение
В 60-х годах двадцатого века в дискуссии об
автоматах и разумном поведении М. Минский сказал: «Разумность это химера, мы считаем данное действие разумным до
тех пор, пока нам его не объяснили». М. Минский был одним из отцов-основателей
направления «искусственный интеллект». Видимо, в этом тезисе содержалась
основная аксиоматика работ тех лет в области искусственного интеллекта. Однако,
к жизни вновь и вновь возрождаются работы, связанные с механизмами становления
интеллектуальной деятельности живых систем [13], работы с попытками отказаться
от «предопределенной интеллектуальности» и демонстрацией становления этого
свойства в сложных кибернетических системах. В семидесятых годах прошлого века
эта область знаний в ее кибернетическом аспекте была представлена в основном
отечественными работами. В конце шестидесятых годов на Западе интерес к
бионическим исследованиям резко упал, а в Советском Союзе как раз на конец 60-х
– середину 70-х годов приходится их максимальное развитие. Потом более двадцати
лет эти работы были мало представлены в отечественной литературе и, в какой-то
степени, связь времен разорвалась. Многое, что сейчас постулируется и
исследуется, было исследовано в те времена с достаточной глубиной и полнотой.
Ярким свидетельством этому могут служить работы школы Н.М. Амосова [14] Института
Кибернетики АН УССР. На этот же период приходится развитие нейрокибернетических
работ школы А.Б. Когана [15] в Ростовском госуниверситете, одна из разработок
которой и описана в данной статье. Каким бы примитивным не было поведение
созданного в те годы поведение мобильного робота, удалось показать, что в
процессе его поведения формируется функциональная система из нейроноподобных
элементов, которые взаимосодействуют друг другу в получении полезного результата.
Литература
1.Самарин А.И. «Искусственный интеллект» и проблемы
очувствления роботов. // В сб. Проблемы нейрокибернетики. Искусственный
интеллект, биотехнические системы, робототехника. Изд-во Ростовского ун-та,
Ростов н/Д, 1979, с. 64-76.
2. Шепелев И.Е. Функциональная полнота и
универсальность нейронных сетей в приложении к задачам управления роботом. // В
кн.: Проблемы нейрокибернетики. Том 2. Ростов-на-Дону, Изд-во ООО «ЦВВР», 2002,
с.173-176
3.. Цетлин М.Л. Исследования по теории автоматов и
моделированию биологических систем, М.: Главная редакция физико-математической
литературы изд-ва "Наука", 1969, 316с.
4. Эшби У. Р. Конструкция мозга. М.: ИЛ,
1962, 398с.
5. Анохин П.К. Принципиальные вопросы общей теории
функциональных систем. // В кн.: Принципы системной организации функций. М.:
Наука, 1973, с. 5-61.
6. Неймарк Ю.И. Поисковые и
оптимизационные возможности коллективов автоматов. // В сб.: Самоорганизация и
адаптивные информационно-управляющие системы. Москва. 1979. 21-24.
7. Емельянов - Ярославский Л.Б. О логической структуре некоторого самоорганизующегося
автомата. // В сб.: Проблемы адаптивного управления, Ростов-на-Дону, 1974,
120-156
8. Емельянов - Ярославский Л.Б. Интеллектуальная квазибиологическая
система. Индуктивный автомат. М.: Наука, 1990.
9.. Самарин А.И., Ефимов
В.Н. Нейрокибернетические аспекты
синтеза адаптивных управляющих систем. // В кн.: Вероятностно-статистическая
организация нейронных механизмов мозга. Изд-во Ростовского университета. 1974.
149-157.
10. Судаков К.В. Анализ механизмов системной
организации пищевой мотивации на уровне нейронов коры головного мозга. // В
кн.: Системный анализ интегративной деятельности нейрона. М., Наука, 1974, с.
53-69.
11. Ефимов В.Н., Самарин А.И., Финкельштейн Б.А.,
Гринченко С.Н. Моделирование нейронов с самонастройкой их параметров. //
Бионика (Киев: "Наукова думка") №10, 1976. с.109-116.
12.Самарин А.И. Формирование сенсомоторной
координации робота на основе адаптивных нейронных сетей при решении
поведенческих задач. // Нейрокомпьютер, №3, 4, 1996. с.39 – 47.
13. Редько В.Г. Эволюционная кибернетика. // Научная
сессия МИФИ. IV Всероссийская научно-техническая конференция
«Нейроинформатика – 2002»: Лекции по нейроинформатике. Часть1. – М.: МИФИ,2002.
с. 29 –65.
14. Амосов Н.М., Касаткин А.М., Касаткина Л.М.,
Талаев С.А. Автоматы и разумное поведение. Киев: «Наукова думка» 1973. 352 с.
15. Коган А.Б. Функциональная организация нейронных
механизмов мозга. Л.: «Медицина», 1979. 224 с.